Engineering
About
I'm a mechatronics engineer with a B.S. in Mechanical Engineering (Mechatronics) from the University of Washington, graduating in 2020 with a 3.53 GPA. I work on projects end-to-end - designing PCBs, writing firmware, building CAD models, and machining parts when needed. My background spans electric vehicle development, robotics, IoT systems, and embedded electronics across startup and consulting environments.
Capabilities
Technical Skills
Electronics
PCB Design, Circuit Design, Power Systems (800VDC), Control Systems, Embedded Systems, IoT, Robotics
Firmware
C++, Python, Embedded C, ESP8266/ESP32, PLC Programming (Siemens TIA Portal), Plus+1 Guide
Mechanical
SolidWorks, Fusion 360, AutoCAD, NX, Structural Analysis, Sheet Metal Design, Suspension Design, DFM
Software
MATLAB, Ansys, Unity, AWS IoT/MQTT, EPLAN, Git
Manufacturing
CNC Programming, Manual Mill & Lathe, Plasma Table, Press Brake, FDM/SLS/SLA 3D Printing, Electronics Assembly
Timeline
Experience
Consulting and design in EV and startup environments. Designed and implemented vehicle firmware, PCB control hardware, and performed structural analysis. Managed multidisciplinary projects across electrical, firmware, and mechanical disciplines.
Optimized and scaled sheet metal manufacturing processes. Designed mechanical and electrical subsystems for custom fabrication projects. Led development of control system components and integrated electrical hardware.
Worked with the electrical engineering team on high-power electronics and PLC programming for Varcor® waste processing systems - a joint project with the Bill and Melinda Gates Foundation.
Taught SolidWorks modeling, engineering drawings, and GD&T standards to undergraduate students.
Chief technician in the campus recording studio. Recording and mixing engineer for larger ensemble projects.
Selected Work
Projects
Seven projects, ordered by relevance to embedded, robotics, power-electronics, and EV work. Each links to a detail page.

Designed all electrical systems - pilot control, power distribution, data logging, variable-pitch propeller, and a custom battery pack - plus custom PCBs and all embedded firmware. Served as CAD lead. Team placed 1st internationally in the design report competition.
1st internationally - Design Report competition

Led all mechanical work on a tilting three-wheel EV. Built a generalized suspension-geometry simulation framework - first in Python, then a full Unity application with an integrated UI and an evolutionary optimization algorithm - and created all manufacturing files through production.
Before/after data confirms the design changes

Integrated Cascadia Motion's 800VDC battery system and 350kW drivetrain into an Ariel Nomad chassis as the sole engineering team. Designed the full Power Distribution Unit, managed the master CAD assembly, and performed all CNC machining including decorative battery faceplates.
Sole engineering team · 800VDC · 350kW

Designed the complete embedded electrical stack for a full-body robotic haptics platform for VR. Delivered three custom PCB families - BLE hand controllers, armature control boards with load-cell sensing, and foot-platform motion boards - and wrote all embedded firmware across them.
Took over a stalled electrical project for the Robot Heart nonprofit's double-decker bus. Delivered complete electrical schematics, wiring harnesses, and preliminary firmware in roughly two months. The bus ran at Burning Man.
Ran at Burning Man · ~2-month turnaround
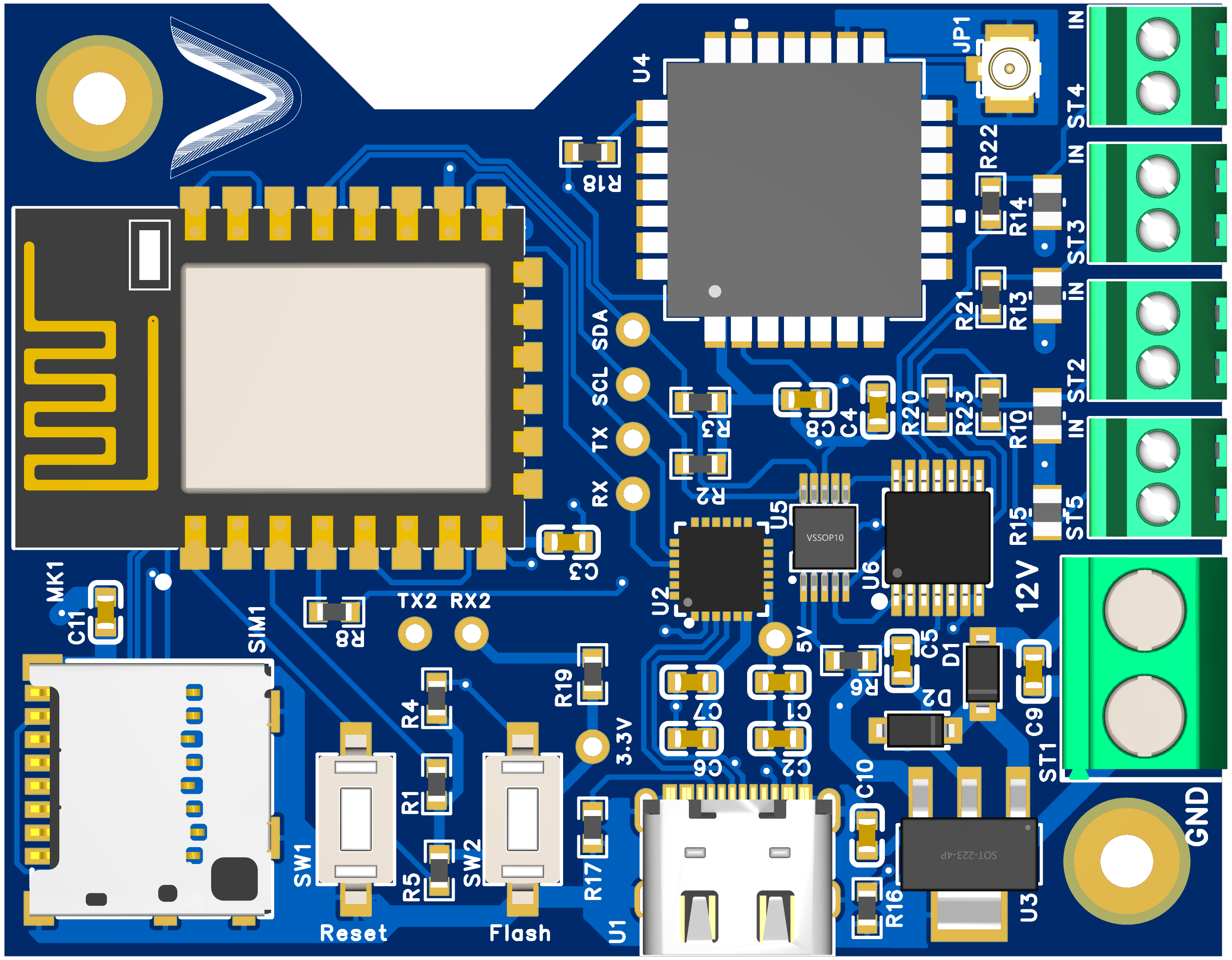
Designed a complete end-to-end IoT sensor network. Custom ESP8266-based PCBs with Seeed Studio LoRa modules handle field sensing and wireless transmission, and a full AWS MQTT backend handles cloud ingestion, data logging, and remote monitoring. The system was delivered functioning.
Delivered and functioning · field-validated data
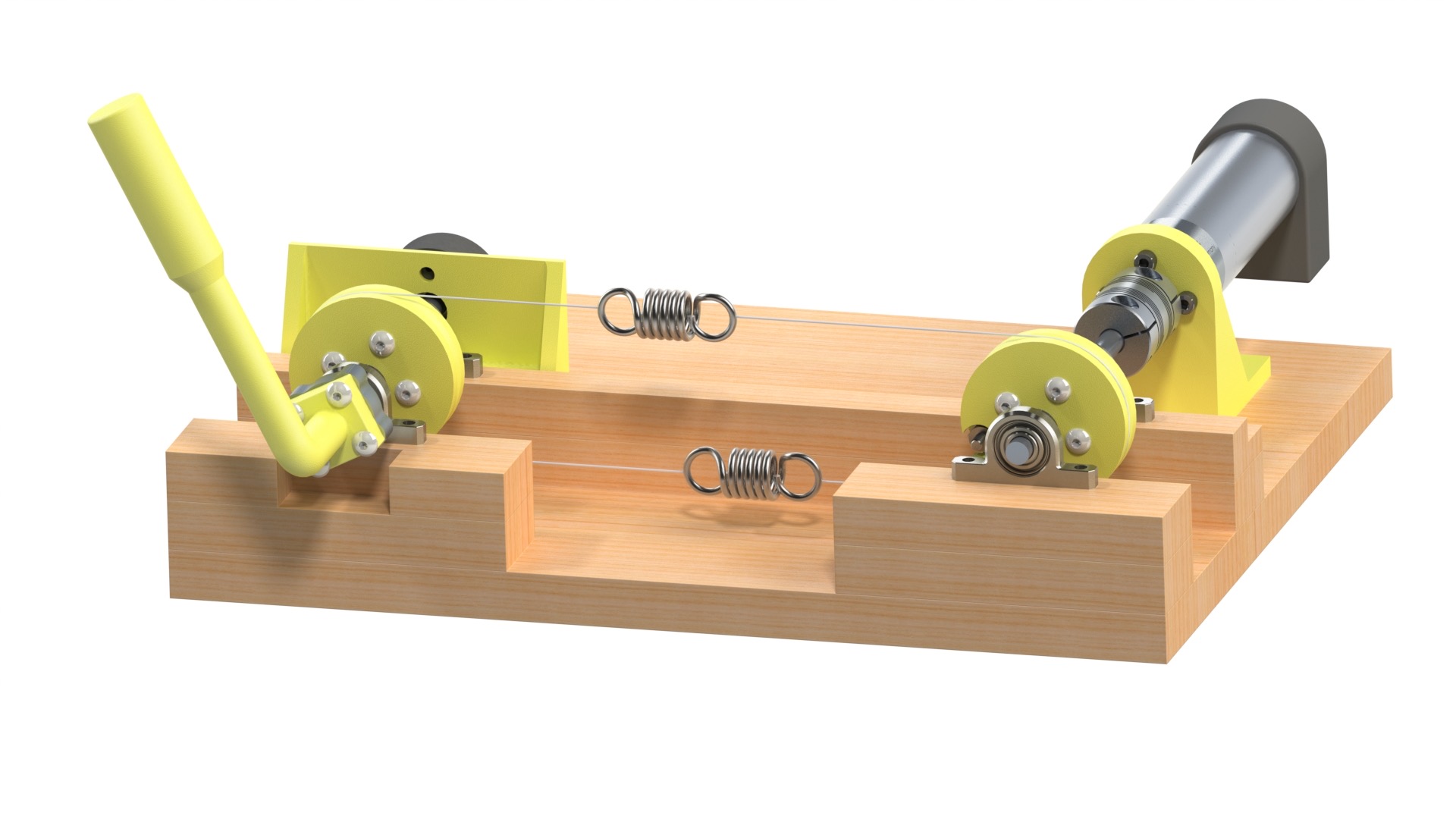
Designed and built a tabletop MARIONET-style Series Elastic Actuator for safer human-robot interaction. Implemented a dual-loop control architecture - inner torque loop with a custom lead controller and outer position loop with PIDF - simulated in MATLAB and implemented in embedded C on an NI myRIO.
Validated on hardware: stable tracking, disturbance rejection, torque control
Education
Education
GPA 3.53