Series Elastic Actuator · ME 495 Mechatronics Capstone
A series-elastic actuator for safer human-robot interaction
Designed and built a tabletop MARIONET-style Series Elastic Actuator with a dual-loop control architecture - designed and simulated in MATLAB, then implemented in embedded C on an NI myRIO. Hardware testing demonstrated stable position tracking, disturbance rejection, and torque control.
Validated on hardware: stable tracking, disturbance rejection, torque control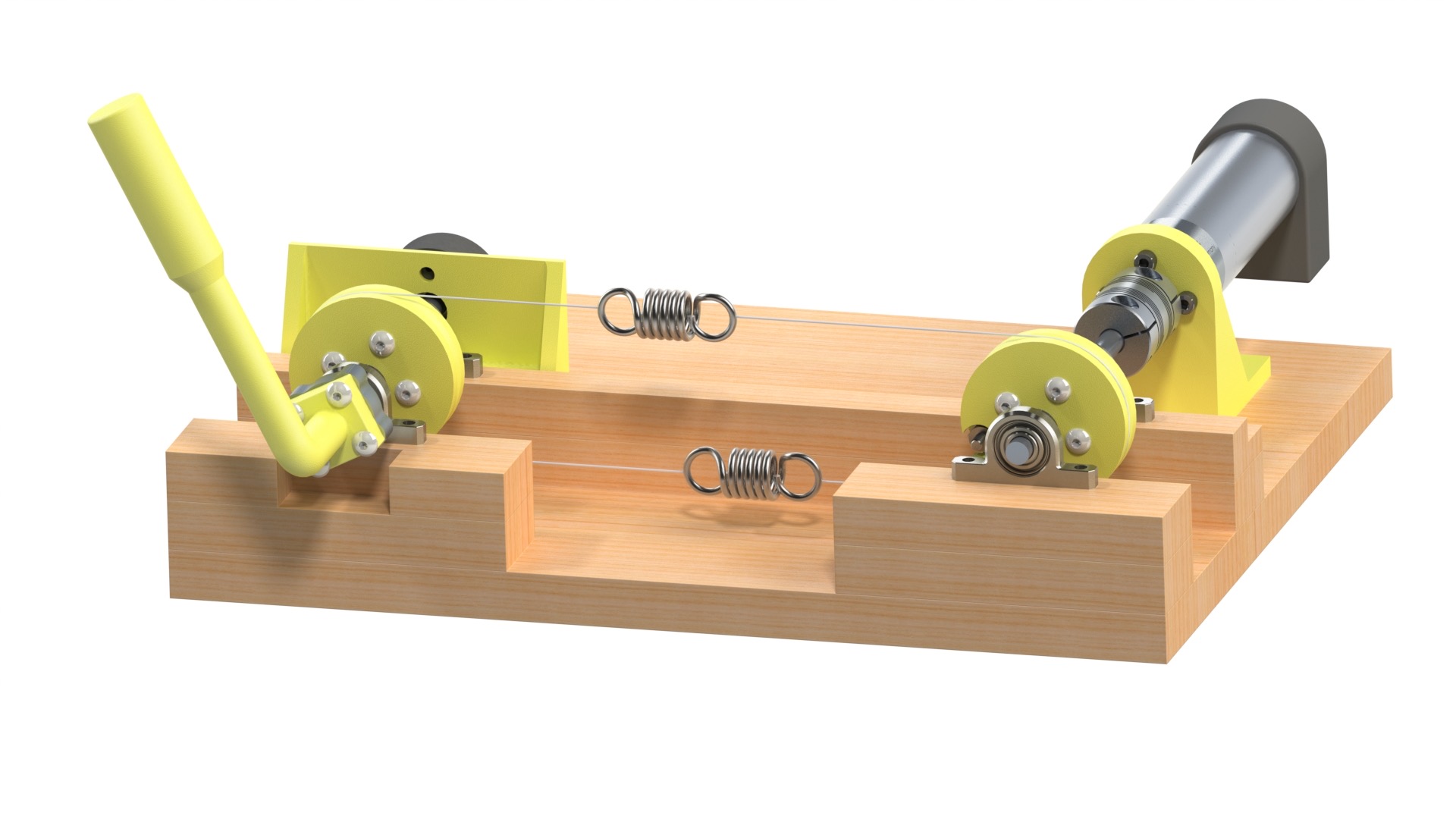
My contribution
- Designed and built a tabletop MARIONET-style Series Elastic Actuator for safer human-robot interaction.
- Implemented a dual-loop control architecture - an inner torque loop with a custom lead controller and an outer position loop with PIDF.
- Simulated the controllers in MATLAB, then implemented them in embedded C on an NI myRIO.
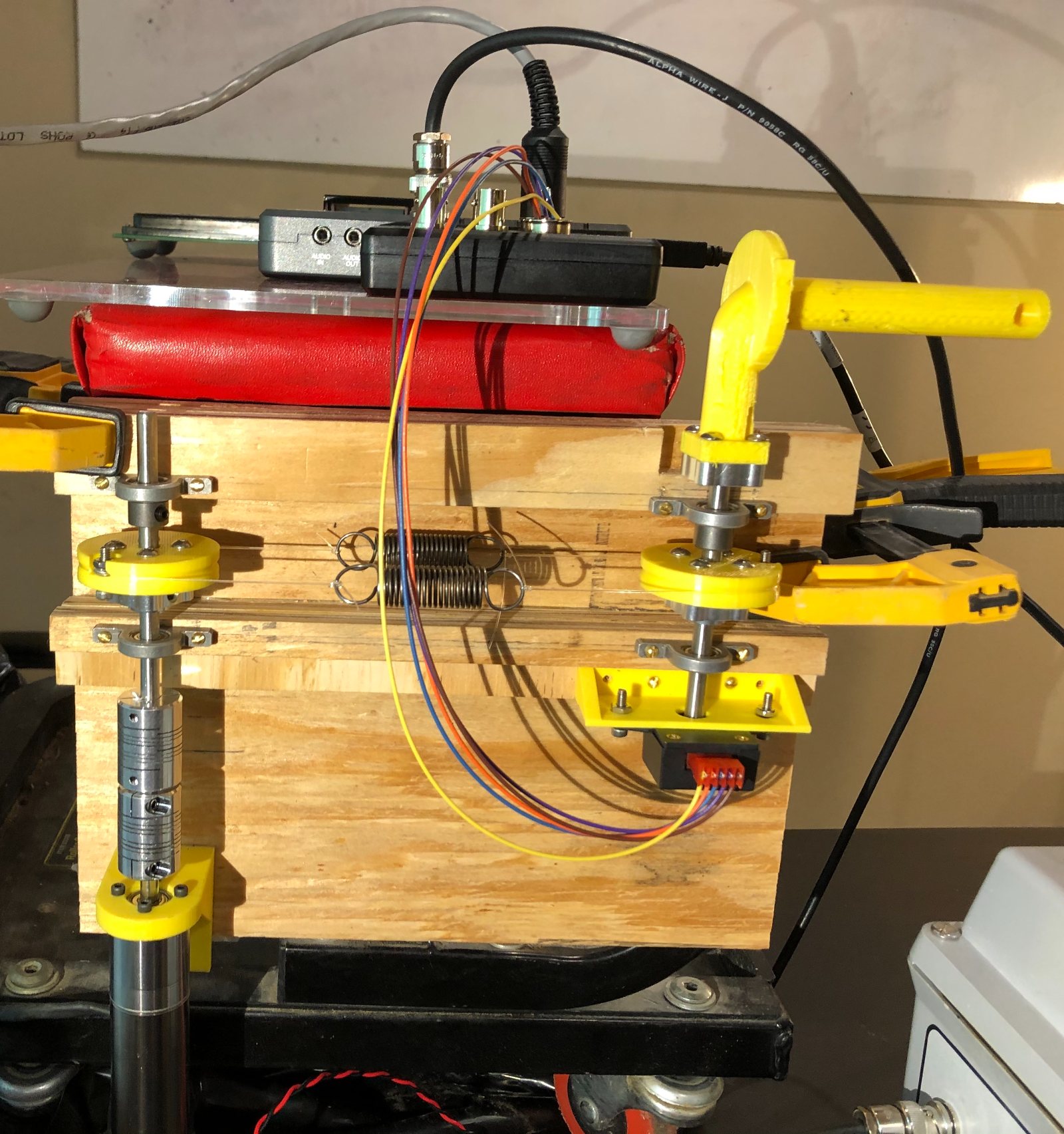
- Validated on hardware: stable position reference tracking, disturbance rejection, and torque control.
Objective
Series elastic actuators put a spring between motor and load so a robot can sense and limit the force it applies - the basis for safer physical human-robot interaction. This senior mechatronics capstone set out to design, build, and control one on the tabletop, taking it from a MATLAB model to validated hardware.
Technical details
Control is split into two nested loops. The inner loop regulates torque through the elastic element with a custom lead controller; the outer loop regulates position with PIDF wrapped around it. Both were designed and simulated in MATLAB before being implemented in embedded C on a National Instruments myRIO. On hardware, the actuator tracked position references stably, rejected disturbances, and held torque control as designed.